NASA Europa Lander Docking and Sample Transfer System
Senior Capstone Design Project
Fall 2017
Fall 2017
Final Report
|
Poster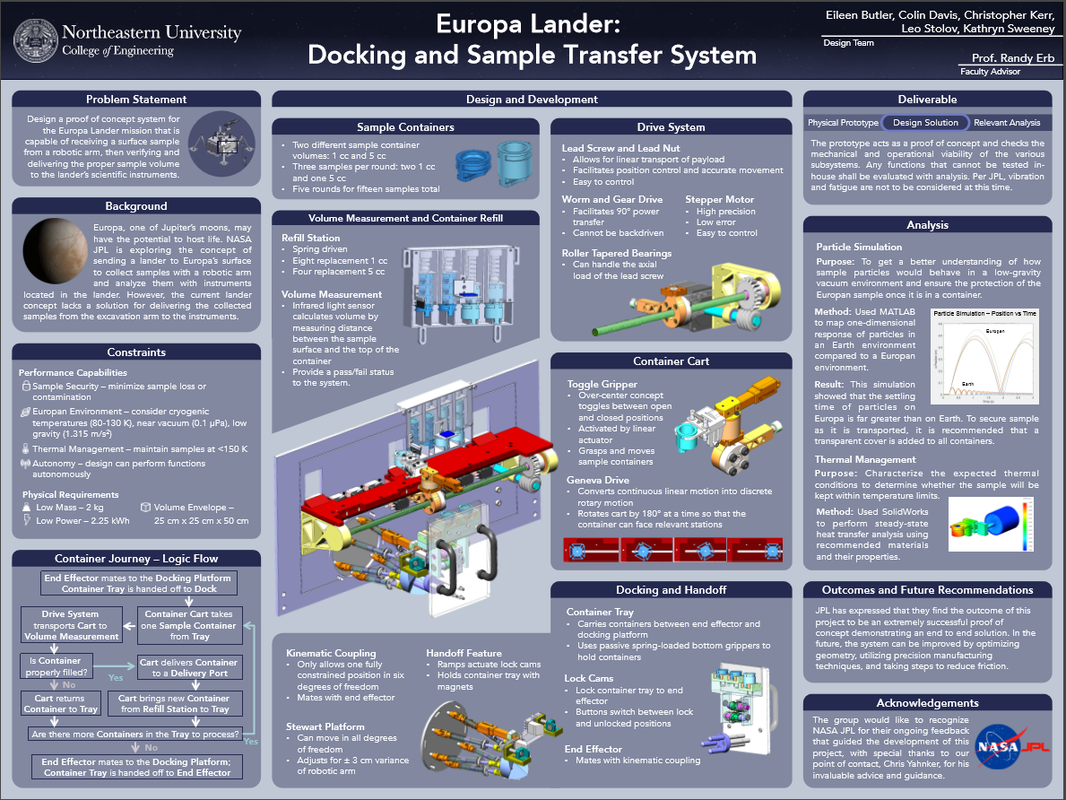
| ||||
|
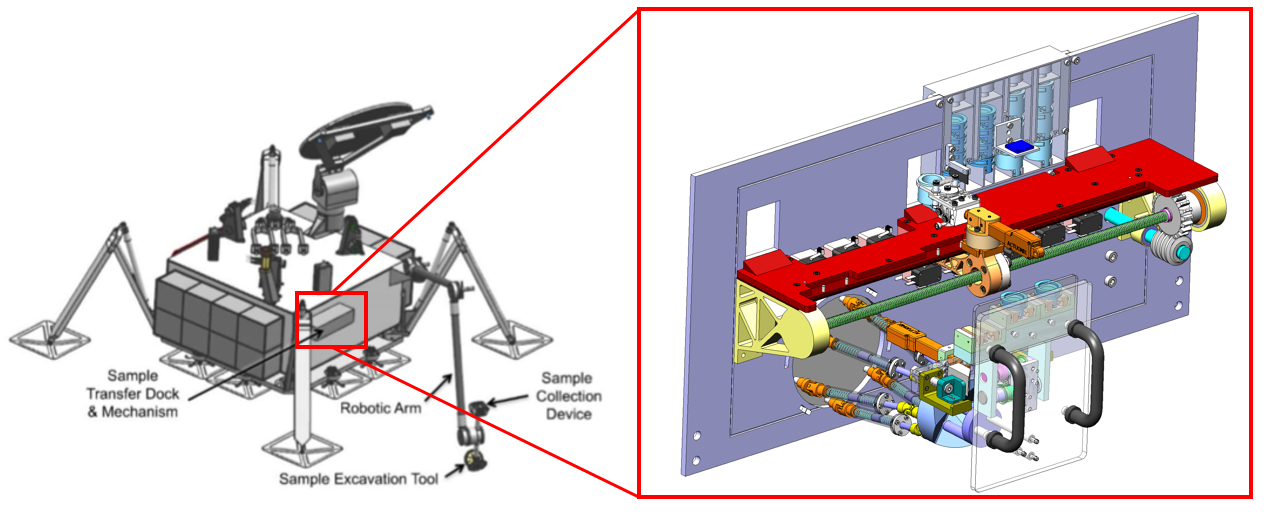
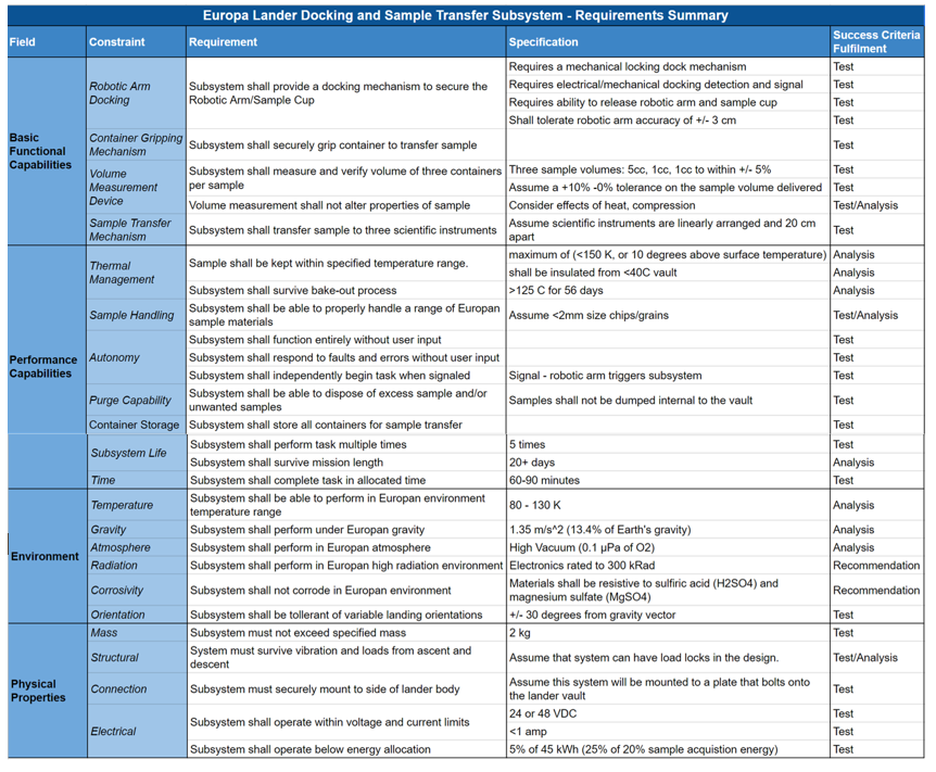
NASA JPL’s Europa Lander needs a system that interfaces with its robotic excavation arm and the lander body, in order to transport collected surface samples to scientific instruments.
NASA JPL wants to send a lander to Jupiter’s moon Europa to investigate the possibility that it could potentially host life (Rep 1.1-1.2). At its current stage, the Europa Lander has a robotic arm that will collect sample material from the surface, and several scientific instruments in the body of the lander that will analyze these samples. However, NASA JPL has not yet developed the system that will transfer the samples from the arm to the instruments. This project, referred to as the Europa Lander Docking and Sample Transfer system, or ELDST, provides a potential system designthat will act as a proof of concept and provide useful data points for NASA JPL as they continue their development of the Europa Lander project. |

|
|
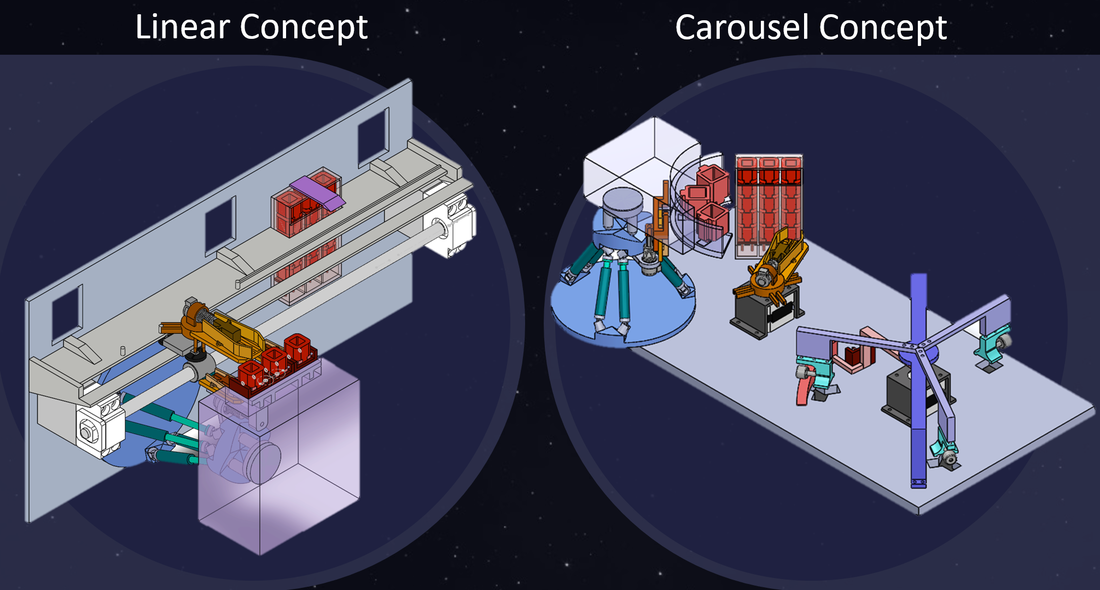
The chosen design uses a lead screw to transport a sample along the wall of the lander and an infrared sensor to optically measure the volume.
Design Description The design that was ultimately chosen was the linear concept that employs a lead screw as the sample container’s primary transport mechanism. The overall design can be broken down into four subsystems: docking and sample handoff from the robotic arm, sample container transport, optical volume measurement, and container resupply. 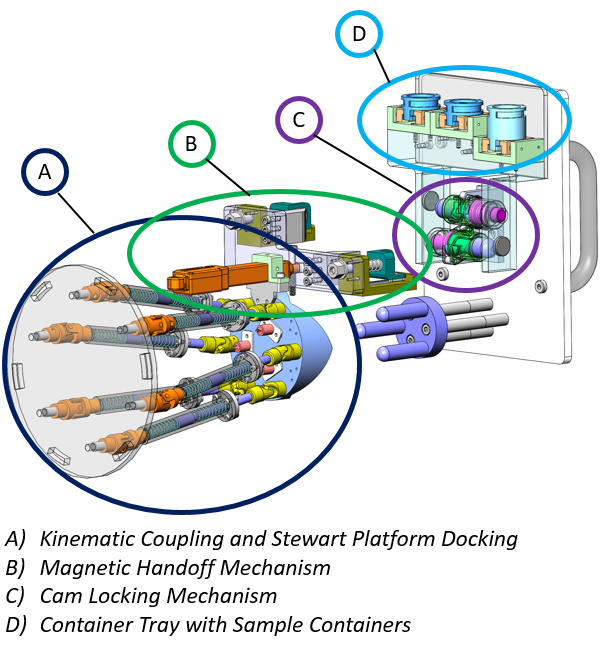
|
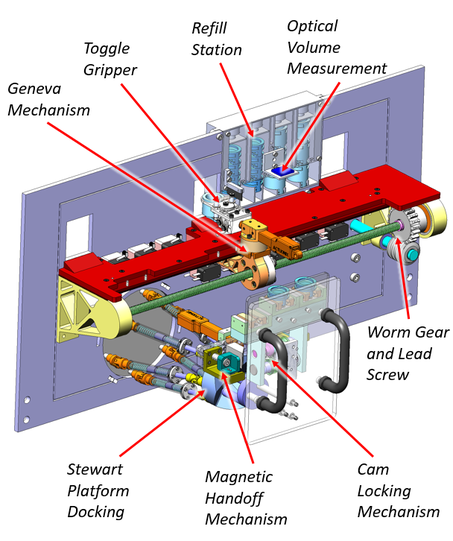
Docking
For docking and aligning the robotic arm, ELDST uses a kinematic coupling, where three hemispherical features on the arm mate with three radial grooves on the docking platform, in conjunction with a Stewart platform, which has six spring-loaded “legs” and is capable of adjusting in six degrees of freedom (Rep 5.2.1). Passive spring-loaded grippers secure the tray of sample containers as they are handed off to the system. |
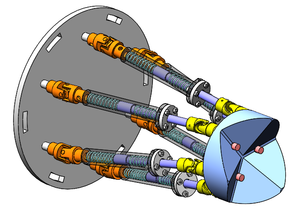
Modified Passive Stewart Platform
|
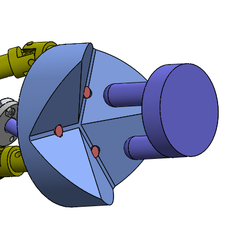
Kinematic Coupling
|
Magnetic Handoff Mechanism
|
Demonstration of spring based passive gripping mechanism
Demonstration of release mechanism
|
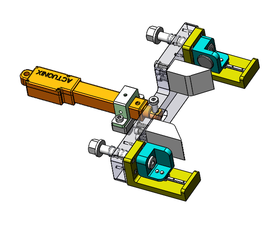
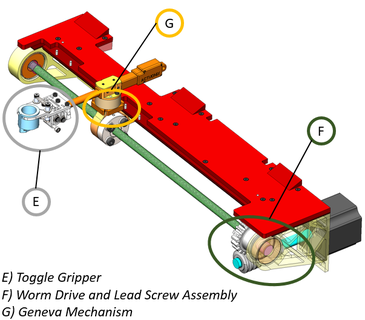
Toggle Gripper
Once the tray is secured, a linear actuator grabs one sample container at a time with a bi-stable toggle gripper that is spring activated when the gripper trigger presses against a sample container. Then, the linear actuator draws the sample back to the container-gripping cart, which is on the lead nut of the lead screw. Detailed analysis on this mechanism can be found here. 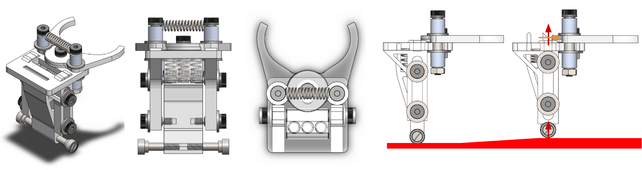
Bi-stable Toggle Gripper Mechanism Design
|
|
Linear Geneva Mechanism and Gear Train
To transport the sample, a worm and worm gear drive the lead screw to move the cart horizontally along the lander wall while a linear Geneva mechanism passively rotates the cart 180° so that the gripper with the sample container faces the lander wall. Detailed analysis on this mechanism can be found here. 
Demonstration of a passive linear motion to discrete rotary motion mechanism.
|
|
|
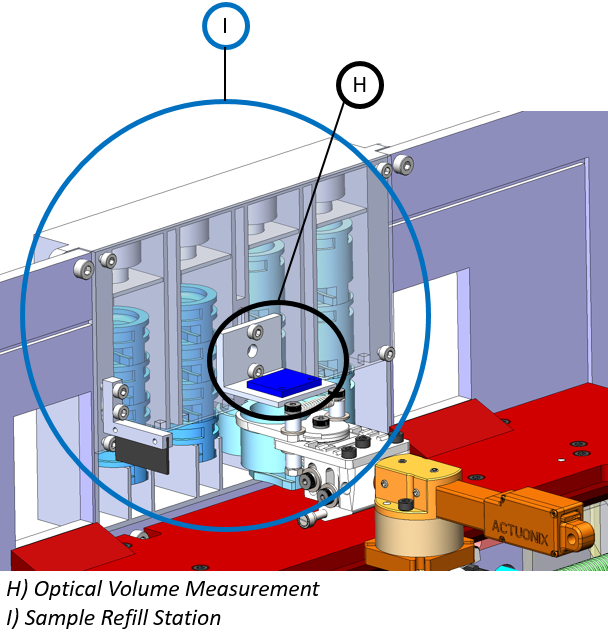
Volume Measurement and Sample Refill
The sample container is first moved to the volume measurement station where a flexible scraper is used to clear the sample container surface, and an infrared proximity sensor is used to determine the volume by recording the position of the top layer of the sample. If the measured volume is deemed sufficient, then the lead screw brings the sample container to a delivery port and the linear actuator places it inside the lander body. If the volume is deemed insufficient, the lead screw brings the sample container back to the dock and replaces the sample in the tray for additional sample collection. After a sample container is delivered or returned, the process is repeated with the remaining sample containers. Once a full round of three sample containers is delivered to the instruments inside the lander, the lead screw will bring the container-gripping cart to a container resupply station, where it will bring new sample containers back to the now empty sample tray one by one for the robotic arm to take and fill. |
|
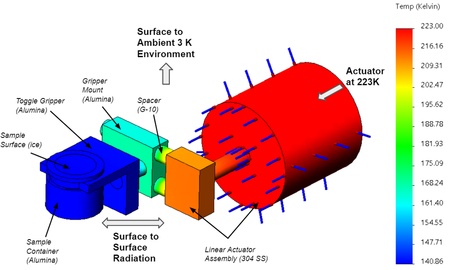
Thermal Radiation and Conduction Analysis - Model and Conditions
|
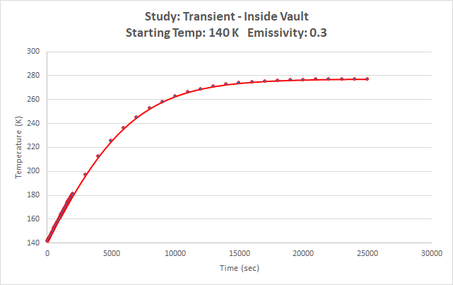
Thermal Radiation and Conduction Analysis - Transient Simulation Results
|
|
A simulation was developed to compare the behavior of dust and small particles in an Earth environment and a Europan environment. The collected Europan surface sample will consist of small particles and it is important to consider the effects of a low gravity vacuum when making design decisions. The results of this comparison indicated that the Europan environment will lead to increased sensitivity to impulse forces on particles, significantly underdamped particle behavior, and much longer settling times than an Earth environment. This led the design team to recommend the placement of a lid on the sample containers by the robotic arm at the time of sample excavation.
|
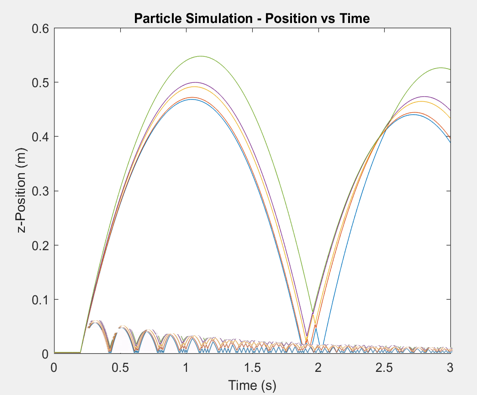
Particle simulation implemented in MATLAB that compares particle behavior after receiving an impulse force in Earth and Europa environments
|
|
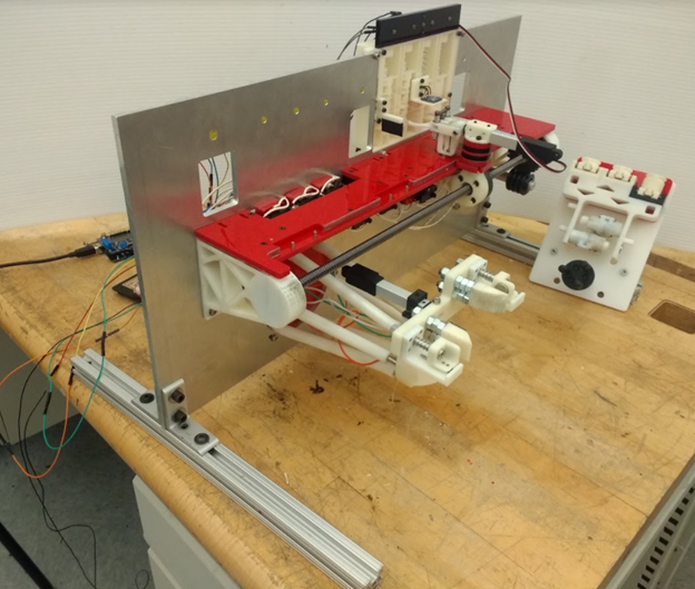
The prototype serves as the primary test method to prove out the functionality of each individual mechanism, as well as their integration into one main assembly. The prototype highlights weaknesses of the design that are difficult to accurately account for analytically such as friction between sliding surfaces, force mismatches during container handoffs, and tolerance stack ups.
|
|
Capstone Videos Combined from Leo Stolov on Vimeo.