Self Folding
Electrostatic
Zipper Hinge
Design & Control
Master's Thesis
Fall 2017 - Spring 2018
Fall 2017 - Spring 2018
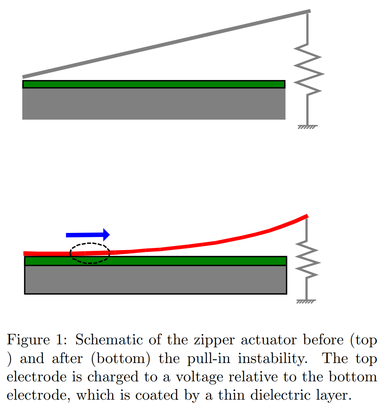 Optimal Design of an Electrostatic Zipper, M.P. Brenner, J.H. Lang, J. Li and A.H. Slocum, 2004
Optimal Design of an Electrostatic Zipper, M.P. Brenner, J.H. Lang, J. Li and A.H. Slocum, 2004
